تفاصيل دقيقة:
نصائح
1. لا يمكن ل INAV و DSHOT العمل على S3 و S5 و S7 بسبب تعارض DMA ، يرجى استخدام ONESHOT أو MULTISHOT ومعايرة نطاق ESC PWM.
2. BetaFlight ، ضع dshot_bitbang = ON عند استخدام X6 و X8 DSHOT.
3. BetaFlight ، تم تغيير اسم الهدف إلى MatekF405TE_SD
4. أردوبيلوت، قم بتعيين LOG_BACKEND_TYPE = 1 (ملف) لتسجيل بطاقة SD
مواصفات
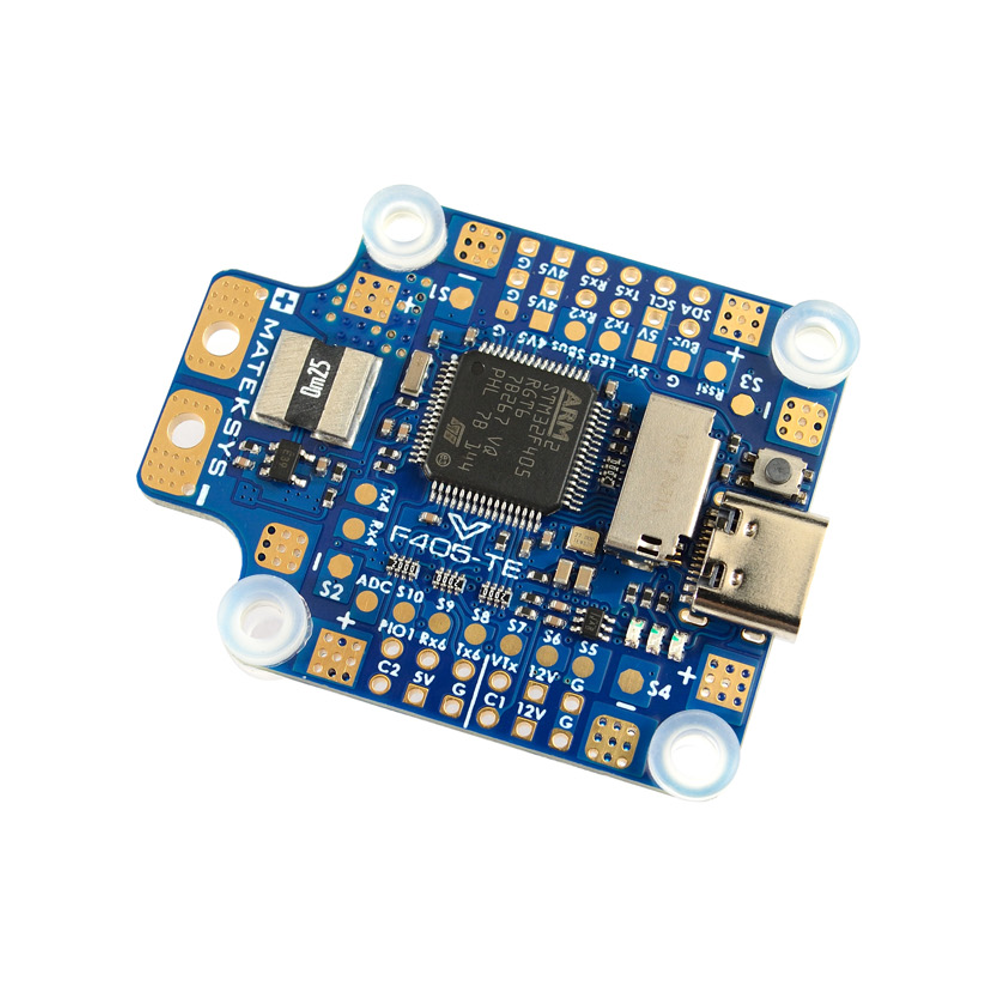
MCU: 168MHz STM32F405RGT6
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
الصندوق الأسود: فتحة MicroSD (SPI)
6x UARTs، 1x Softserial_Tx خيار (INAV/BF)
11 مخرج PWM (8 Dshot متوافقة مع BF/أردوبيلوت)
1x I2C
4x ADC (VBAT، التيار، RSSI، سرعة الهواء)
PINIO بديل 1x
4x أقراص طاقة / إشارة ESC فردية
مجموعة من الأقراص G/S1/S2/S3/S4 لإشارة 4in1 ESC / GND
جهاز تحويل مدمج على UART2-RX لإدخال SBUS
مدخل كاميرا مزدوجة قابلة للتبديل
مواصفات PDB
9~36V (3~8S LiPo)
PDB: 4x 35A (الحد الأقصى 4x 50A)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3.3V: 200mA
قنطرة التيار الحالية: 220 أمبير، ADC 3.3 فولت (INAV/BF مقياس 150، أردوبيلوت 66.7 A/V)
جهاز تقسيم جهد البطارية 1K:20K (مقياس INAV 2100، مقياس BF 210، مضاعفة جهد البطارية أردوبيلوت 21.0)
البرامج الثابتة
أردوبيلوت: MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
جسدي
التركيب: 30.5 × 30.5 ملم، Φ4 ملم مع غرفات Φ3 ملم
الأبعاد: 36 × 46 مم
الوزن: 10 جم
بما في ذلك
1x F405-TE
6 حلقات سيليكون M4 إلى M3
1x روبيكون ZLH 35V/470uF (منخفض ESR)
التخطيط والتوصيلات الكهربائية

تعيين INAV/BF
تعيينات أردوبيلوت
تلميتري سمارتبورت فرسكي
إشارة S.Port غير مقلوبة (مخترقة)
أي Uart_TX احتياطي
SERIALx_BAUD 57
SERIALx_OPTIONS 7
بروتوكول SERIALx_PROTOCOL 4 أو 10 (لـ yaapu)
DJI FPV OSD (أردوبيلوت 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0 (وضع الاستطلاع)
ريليه (PINIO)
PINIO1، الطرف PIO1، منخفض المستوى افتراضيًا
PINIO2، مفتاح الكاميرا، C1 مفتوح بشكل افتراضي
# GPIOs
PA4 PINIO1 OUTPUT GPIO(81) LOW //PIO1 الحشوة
PB5 PINIO2 OUTPUT GPIO(82) LOW //مفتاح الكاميرا
# RCx_OPTION: خيار إدخال RC
28 تشغيل/إيقاف التتابع
34 ريلي2 تشغيل/إيقاف
35 التتابع3 تشغيل/إيقاف
36 ريلاي4 تشغيل/إيقاف
على سبيل المثال
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //تشغيل/إيقاف الريليه، استخدم CH7 للمرسل للتحكم في مستوى PIO1 المنخفض/العالي
RELAY_PIN2 82 //تبديل الكاميرا GPIO
RC8_OPTION 34 //تشغيل/إيقاف الريلي2 ، استخدم CH8 من المرسل للتحكم في المستوى المرتفع / المنخفض على الوسادة PB5
سيتم تنشيط الميزة المكونة عندما يصبح قيمة نبض الإخراج التقديمي للمفتاح الاحتياطي أعلى من 1800. سيتم تعطيله عندما تنخفض القيمة أدناه 1200.
تحقق من قيمة نبض الإخراج التي ترسلها المرسلة عندما يكون المفتاح عاليًا ومنخفضًا باستخدام شاشة معايرة الإرسال >> الأجهزة الإلزامية >> التعريف الأولي للمخطط (Mission Planner's Initial Setup >> Mandatory Hardware >> Radio Calibration). إذا لم تصعد أعلى من 1800 أو أقل من 1200، فمن الأفضل ضبط نقاط النهاية للخدمة في المرسلة.
نصائح
- يحتوي F405-TE على INAV fw مُحمَّل مسبقًا لـ QC
- قم بتعيين معدل تردد BLHeli32 ESC PWM على 48 كيلوهرتز أو أعلى في BLHeliSuite
أردوبيلوت
تحذير ""أردوبيلوت fw ، “Internal errors 0x4000 l:213 spi_fail” ، يرجى ضبط LOG_BACKEND_TYPE = 1 (File) لتحميل سجلات بطاقة SD.nقم بتنزيل أردوبيلوت firmware من هنا.
INAV
مع برنامج الرمز الثابت INAV ، لا يمكن لـ DSHOT العمل على S3 و S5 و S7 بسبب تعارض DMA. يرجى استخدام ONESHOT أو MULTISHOT ومعايرة نطاق PWM للـ ESC.
قم بتنزيل برنامج INAV firmware 4.1.x من موقع Matck. INAV5.x أو أحدث مباشرة من INAV configurator
BetaFlight
إذا كنت تستخدم جهاز تنبيه ساكن بجهد 5 فولت، اكتب CLI 'set beeper_frequency = 2500'.
تم دعم هدف MATEKF405TE_SD منذ إصدار BF4.4.
قم بتعيين dshot_bitbang = ON عند استخدام X6 و X8 DSHOT
قد تقوم بتنزيل BF 4.3 مباشرة من مُكوِّن BF، و BF 4.2.x من هنا.
مقياس الضغط SPL06-001 غير مدعوم من قبل Betaflight.